車載網路通訊協定解析:掌握 CAN Bus 相容性測試關鍵
隨著車載網路架構日益複雜,確保各個 ECU 之間的相容性已成為系統穩定的關鍵。歐特莫夫提供涵蓋物理層至應用層的全方位 CAN Bus 相容性測試方案,利用核心工具深入驗證訊號完整性與通訊穩定性。我們協助客戶識別潛在的通訊衝突、錯誤幀處理機制及匯流排在極限負載下的行為表現,透過克服這些技術難點,確保您的電子控制單元能完美整合於整車網路中,滿足嚴格的車規要求。
01 我們的技術方法
- 物理層電氣特性量測 (Physical Layer)
- 通訊協定與資料鏈結層驗證 (Data Link Layer)
- 網路管理與錯誤處理測試 (Network Management)
- 自動化相容性測試執行 (Automated Conformity Testing)
02 使用的核心工具
我們利用業界標準的 Vector 工具來執行此解決方案:
業界標準的網路開發、測試和分析工具。我們使用 CANoe 來模擬其餘匯流排節點,並執行自動化測試腳本 (CAPL) 來驗證 ECU 行為。
整合示波器硬體於 CANoe 環境中,實現自動化的物理層分析。可精確量測 CAN/CAN FD 的差分電壓、位元寬度、上升/下降時間,並自動產生成符合規範的測試報告。
用於設計複雜自動化測試序列的圖形化開發環境。將測試邏輯與硬體抽象化,顯著提升測試案例的可讀性與重用性。
專用的干擾產生器 (Disturbance Interface)。能夠在 CAN 匯流排上精確地注入物理層和邏輯層錯誤,以測試 ECU 的錯誤處理機制。
專為車載網路實體層測試設計的硬體擴充模組。可執行精確的供電中斷模擬、欠壓/過壓穩定性測試,確保硬體電源特性符合 ISO 標準。
高效能匯流排網路介面 (如 VN1630A)。提供極低延遲的封包傳輸與精確的時戳紀錄,是確保測試數據準確性的硬體基石。
03 技術難點
什麼是 CAN Bus 相容性測試?
CAN Bus 是車輛的神經網路,負責傳輸關鍵的控制訊號。相容性測試旨在確保不同供應商的 ECU 接入網路後,皆能符合車廠的物理層電氣規範與通訊協議標準,避免因阻抗匹配不良、採樣點偏移或電壓準位異常而導致的通訊錯誤。
核心功能與技術優勢
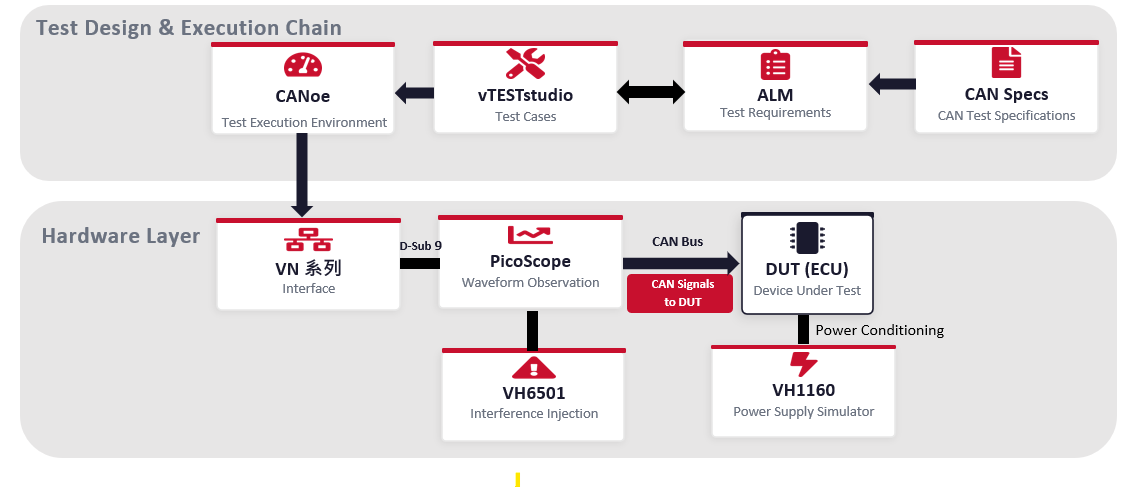
這張架構圖展示了完整的 CAN Bus 測試工具鏈與鏈路流程。從頂層的測試設計(vTESTstudio)、測試管理(Polarion)到執行層(CANoe),並連結至底層硬體介面(VN 系列)、干擾注入(VH6501)、電源合規測試(VH1160)及波形觀測(PicoScope),最終對待測物(DUT/ECU)進行全方位的驗證。
需求定義與測試矩陣建立
從 CAN 測試規範(Specs)出發,使用 Polarion 與 Excel 建立可追溯的測試矩陣 (Test Matrix),確保每一條測試需求都能對應到具體的測試案例,不遺漏任何邊界條件。
殘餘匯流排模擬 (RBS) 與環境搭建
利用 Vector 工具鏈 (CANoe + VN Interface) 搭建殘餘匯流排模擬 (RBS) 環境,模擬真實車輛網路中其他 ECU 的行為,為待測物 (DUT) 提供完整的通訊上下文。
vTESTstudio 案例開發與 CAPL 整合
使用 vTESTstudio 設計結構化的自動化測試流程,並結合 CAPL 程式語言進行底層訊號控制與邏輯判斷,實現複雜的錯誤注入與動態行為驗證。
全自動化執行與壓力測試
將測試專案導入 CANoe 進行無人值守的自動化執行,包含連續 24-48 小時的通訊壓力測試 (Stress Test),即時監控並記錄 Bus Load、Error Frames 等關鍵指標。
標準化報告產出與分析
測試結束後自動生成詳細的 PDF/HTML 測試報告,包含通過/失敗統計、波形截圖與詳細 Log 分析,協助開發團隊快速定位問題並提出改善建議。
歐特莫夫全方位技術解決方案
歐特莫夫為您整合從需求管理、測試設計到硬體執行的完整工作流,確保您的車用電子產品符合最嚴苛的通訊標準與品質要求。
建構可追溯的測試設計與管理體系
我們協助客戶導入符合 ASPICE 與 ISO 26262 標準的開發環境:
- 需求與測試同步管理: 協助整合 ALM 需求管理平台,將 CAN 測試規範轉化為可追蹤的測試需求,確保每一項測試都能回溯至原始設計規格。
- 模組化測試案例開發: 利用 vTESTstudio 進行結構化的測試腳本設計,將複雜的測試邏輯模組化,大幅降低維護成本並提升測試覆蓋率。
- 自動化執行引擎部署: 針對 CANoe 進行客製化配置,作為核心執行軟體,實現測試腳本的自動加載、執行與報告產出,並將結果回饋至管理端,形成閉環驗證。
部署高階物理層與干擾測試環境
我們提供深度的硬體整合服務,模擬真實且極端的車載網路環境:
- 精準的通訊介面整合: 透過VN 系列介面卡 連接待測物 (DUT),確保高頻寬與低延遲的數據傳輸,完美支援 CAN/CAN FD 通訊協定。
- 電氣特性與功率測試: 導入 VH1160 模組,針對 ECU 進行電壓波動模擬與功率消耗分析,驗證產品在電源不穩環境下的合規性 (Compliance)。
- 進階干擾與故障注入: 運用 VH6501 干擾儀進行數位與類比干擾注入 (Interference Injection),模擬匯流排短路、位元錯誤等異常情境,測試系統的容錯能力與恢復機制。
- 訊號完整性監測: 整合 PicoScope 示波器,即時捕捉並分析實體層波形,確保訊號品質符合車廠規範,無隱藏的雜訊或畸變風險。
歐特莫夫的競爭優勢
軟硬體深度整合的技術實力
不同於單純的軟體開發商或硬體代理商,歐特莫夫具備串聯ALM (管理層)、CANoe (執行層) 與硬體層的全端技術能力。我們能為您解決跨平台工具串接的痛點,打造無縫接軌的自動化測試產線。
確保合規與標準化流程
我們不僅提供工具,更提供符合 ISO 26262 功能安全與 OEM 車廠規範的測試方法學。透過建立如圖所示的「V 模型」右側驗證流程,我們協助客戶產出具備公信力的測試報告,加速產品上市審核流程。
客製化自動化架構
無論是針對單一 ECU 的功能測試,還是整車網路的系統級驗證,我們能依據您的 DUT 特性,靈活配置所需的 VN 介面與量測模組,量身打造最符合效益的自動化測試機櫃。