產品介紹
隨著先進駕駛輔助系統(ADAS)與自動駕駛技術的飛速發展,開發者面臨著海量感測器數據處理與複雜路況驗證的巨大挑戰。CANoe 作為汽車電子開發的變革性工具,早已超越了傳統總線分析的範疇,演進為一套功能強大的 ADAS 分析、模擬與測試平台。它不僅能處理來自雷達、光達、攝影機的多源異構數據,更提供了從模型在環(MIL)到硬體在環(HIL)的無縫測試解決方案。
核心功能與技術優勢
1. 全面的數據分析能力 (Data Analysis)
針對 ADAS 系統龐大且複雜的感知數據,CANoe 提供了專屬的分析視窗與擴展功能,讓工程師能直觀地洞察系統行為:
- Trace 視窗擴展 (Trace Window Extension):專為 ADAS 優化的 Trace 視窗不僅能顯示原始信號,還能直接解析並顯示感測器狀態及感知目標的相關參數,讓信號級別的除錯變得清晰易懂。
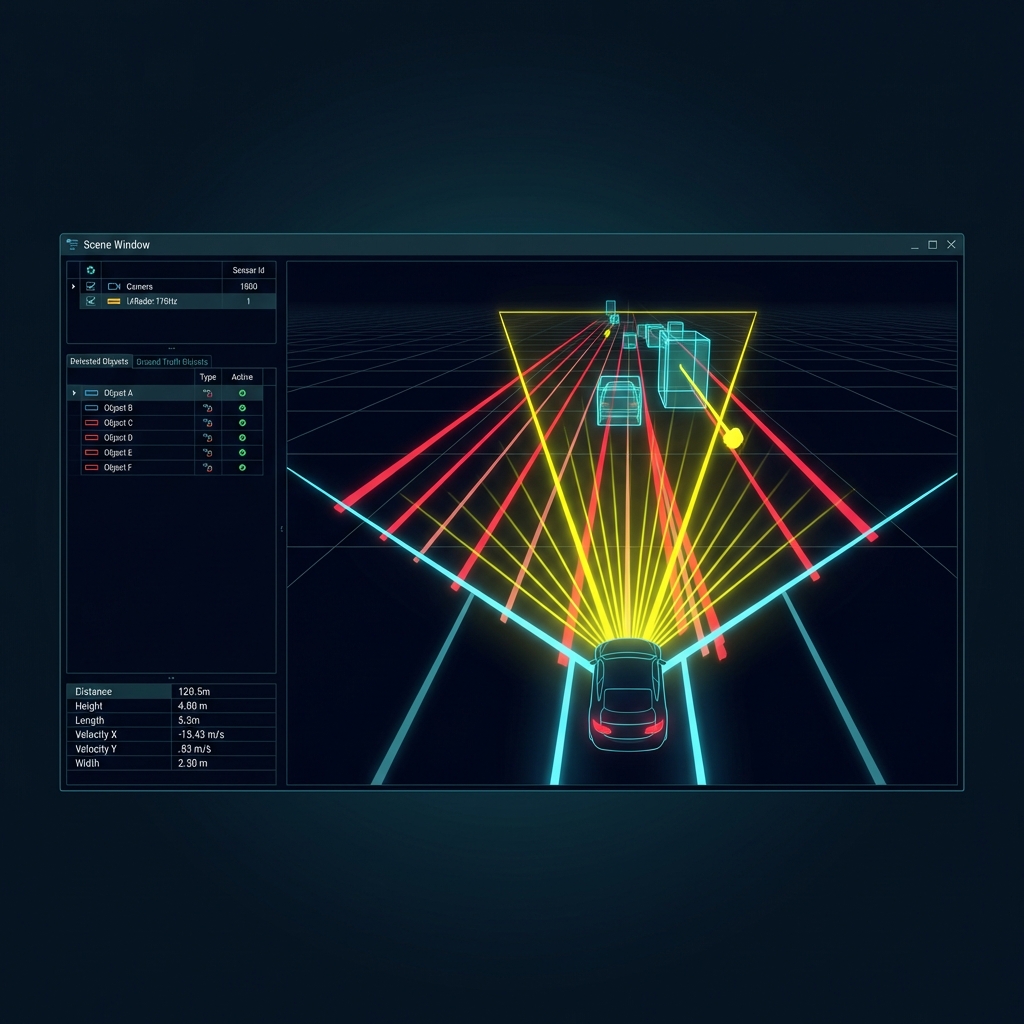
- 專業的 Scene 視覺化 (Scene Visualization):透過專用的 Scene Window,使用者可以將感測器數據、感知目標(Detected Objects)以及真值數據(Ground Truth)進行 3D 視覺化疊加顯示。包含目標的類別(車輛/行人)、數量、距離及大小等資訊一目了然,實現了「所見即所得」的分析體驗。
- 基於 OSI 的標準化分析:CANoe 支援將總線數據轉化為 ASAM OSI(Open Simulation Interface)標準的目標列表並進行視覺化。這意味著無論是在線實時監控還是離線回放數據,用戶都能在所有分析視窗中同步觀測到標準化的感知結果,極大提升了跨平台數據交互的效率。
2. 強大的 XIL 仿真與測試生態 (XIL Simulation & Testing)
為了驗證 ADAS 演算法在各種邊角案例(Corner Cases)下的表現,CANoe 構建了靈活且強大的閉環仿真環境:
- 無縫整合 DYNA4 3D 引擎:CANoe 內建了對 DYNA4 物理場景仿真工具的支援。工程師可以在高品質的 3D 虛擬環境中運行車輛動力學模型與感測器模型,構建出包含天氣變化、複雜交通流的逼真路況,實現高精度的閉環仿真。
- 內建場景編輯器 (Scenario Editor):自帶的 2D 場景編輯器讓用戶能快速搭建測試路網與交通事件,無需依賴昂貴的第三方地圖工具即可開始基礎功能的驗證。
- 廣泛的第三方兼容性:除了原生工具,CANoe 亦支援透過 MATLAB/Simulink 或 C-API 介面與第三方仿真環境進行數據交互,確保能融入客戶既有的開發工具鏈中。
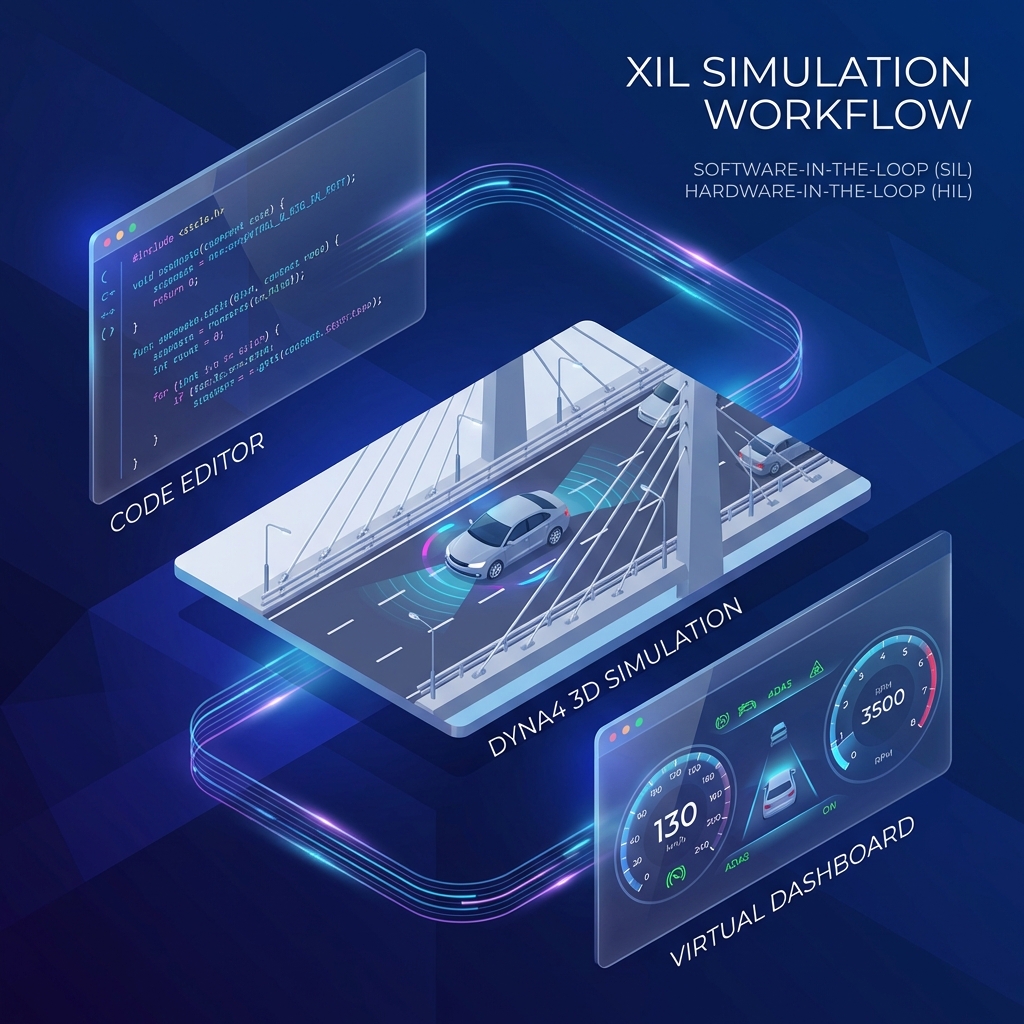 圖:結合代碼除錯、DYNA4 3D 仿真與虛擬儀表的 XIL 閉環測試工作流。
圖:結合代碼除錯、DYNA4 3D 仿真與虛擬儀表的 XIL 閉環測試工作流。
3. 自動化測試驗證 (Test Automation)
在回歸測試與大規模驗證階段,自動化是提升效率的關鍵:
- 豐富的 API 支援:CANoe 提供了完善的測試 API、感測器控制 API 及場景控制 API。開發者可以利用 Python、CAPL 或 C# 編寫自動化腳本,精確控制測試流程中的每一個變量。
- vTESTstudio 深度整合:結合測試設計工具 vTESTstudio,用戶可以以圖形化或表格化的方式設計測試用例,自動生成覆蓋率報告,實現對 ADAS 功能從感知輸入到決策輸出的全鏈路驗證。
應用場景
智慧駕駛感知演算法驗證
在實車路試前,開發團隊可利用錄製的真實路況數據(Replay)或模擬生成的 OSI 數據流,注入到待測的感知演算法中。透過 Scene Window 比對演算法輸出與真值數據的差異,快速定位漏檢或誤檢問題。
虛擬危險場景測試
針對現實中難以復現或高風險的測試場景(如鬼探頭、前車急煞),利用 DYNA4 在虛擬環境中反覆進行測試。這不僅保障了測試人員的安全,還能確保算法在極端條件下的魯棒性。
ECU 軟硬體在環測試 (HIL)
將真實的 ADAS 控制器(ECU)接入 CANoe 仿真環境,由 CANoe 模擬其餘的整車總線信號與感測器輸入。這種「硬體在環」的方式是 ECU 量產前驗收測試的標準流程,確保軟硬體整合後的實時響應符合預期。
價值總覽
CANoe 為 ADAS 開發提供了一個從模型到實車、從虛擬到現實的統一驗證平台。它利用標準化的介面(如 OSI)打破了工具間的壁壘,利用高保真的 3D 仿真(如 DYNA4)填補了路試的空白。對於車廠與供應商而言,這意味著能以更低的成本、更快的速度,交付更安全可靠的智慧駕駛系統。